::產(chǎn)品概述::
AmmSensor軟件開(kāi)發(fā)工具包
描述
AmmSensor為一款兼容藍(lán)牙技術(shù)的3D無(wú)線MEMS傳感器設(shè)備,。該產(chǎn)品重量輕,,體積小,速度快,。結(jié)合加速度計(jì),、陀螺儀和磁力儀、所有三軸,,再加上驅(qū)動(dòng)軟件庫(kù)(DLL),,可生成精確的動(dòng)態(tài)方向感應(yīng)器數(shù)據(jù),采用四元數(shù)或單位向量的形式,。
程序員使用軟件開(kāi)發(fā)工具包(SDK)軟件可創(chuàng)建自己的應(yīng)用程序,。可訪問(wèn)所有原始傳感器輸出數(shù)據(jù)(加速度,,角速度和地球磁場(chǎng)方向),,以及采用四元數(shù)或單位向量形式計(jì)算輸出的動(dòng)態(tài)傳感器方向數(shù)據(jù)。
AmmSensor SDK為Visual Studio 于2008年采用C#和.Net平臺(tái)開(kāi)發(fā),??稍谒挟?dāng)前版本的Microsoft Windows系統(tǒng)包括Windows 7、Vista和XP上運(yùn)行,。
SDK包括一個(gè)動(dòng)態(tài)鏈接庫(kù),,其功能可由用戶(hù)開(kāi)發(fā)的程序來(lái)調(diào)用??墒褂萌魏?Net兼容的語(yǔ)言,;C++、C#和VB,。包括控制傳感器的函數(shù)調(diào)用上的綜合文檔和固件命令,。
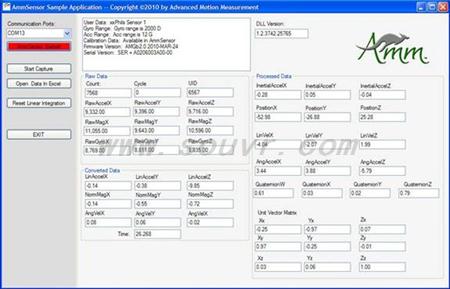
軟件工具包還包括是稱(chēng)為AmmSampleApp的一個(gè)示例程序。本程序演示如何通過(guò)藍(lán)牙使用COM端口連接到傳感器,以及如何提取并實(shí)時(shí)顯示數(shù)據(jù),。用戶(hù)從而能夠直接捕捉并保存數(shù)據(jù)至電子表格,。生成的文件是一個(gè)逗號(hào)分隔的ASCII文本文件。
請(qǐng)注意,,您需要一臺(tái)具有藍(lán)牙功能的Windows電腦,,已經(jīng)安裝Visual Studio 2008 VB,才能查看和運(yùn)行示例應(yīng)用程序,。此示例實(shí)現(xiàn)可用作用戶(hù)創(chuàng)建應(yīng)用程序的基礎(chǔ),。
輸出數(shù)據(jù)的定義
原始數(shù)據(jù)
數(shù)據(jù)未經(jīng)校準(zhǔn),仍然直接來(lái)自所涉及傳感器的原始計(jì)數(shù)單位,。僅能用于開(kāi)發(fā)和測(cè)試,。
計(jì)數(shù)
目前樣本計(jì)數(shù),從1001循環(huán)至16000個(gè),,然后再次啟動(dòng),。
計(jì)數(shù)
m_raw_count
循環(huán)
計(jì)數(shù)已經(jīng)循環(huán)的次數(shù)。
循環(huán)
m_raw_cycle
溫度
原始單位的傳感器內(nèi)部溫度,。
RawTemp
m_raw_temp
唯一ID
AmmSensor開(kāi)始通信時(shí)的當(dāng)前的樣本計(jì)數(shù),。
m_raw_uniqueID
UniqueCount
Ax,Ay,,Az 原始數(shù)據(jù)
來(lái)自3軸加速度計(jì)的加速度向量,,相對(duì)于傳感器的局部坐標(biāo)軸進(jìn)行測(cè)量,采用原始計(jì)數(shù)單位,。這些值代表傳感器線性加速度,。需要注意該向量包括重力在內(nèi)。
RawAccelX RawAccelY,,RawAccelZ
m_raw_accX m_raw_accY,,m_raw_accZ
Mx,My,,Mz原始數(shù)據(jù)
來(lái)自3軸磁力計(jì)的磁力向量,,相對(duì)于傳感器的局部坐標(biāo)軸進(jìn)行測(cè)量,采用原始計(jì)數(shù)單位,。這些值代表指向磁北的一個(gè)向量,。請(qǐng)注意并非平行于地面,而是地面中的點(diǎn),。
RawMagX RawMagY,,RawMagZ
m_raw_magX m_raw_magY,m_raw_magZ
Gx,,Gy,,Gz原始數(shù)據(jù)
來(lái)自3軸陀螺儀的角旋轉(zhuǎn)速率向量,,相對(duì)于傳感器的局部坐標(biāo)軸進(jìn)行測(cè)量,采用原始計(jì)數(shù)單位,。這些值代表傳感器沿每個(gè)軸旋轉(zhuǎn)的速度有多快,。
RawGyroX RawGyroY,RawGyroZ
m_raw_gyroX m_raw_gyroY,,m_raw_gyroZ
轉(zhuǎn)換后的數(shù)據(jù)
數(shù)據(jù)使用校準(zhǔn)參數(shù)轉(zhuǎn)換為物理單位,。校準(zhǔn)在出廠時(shí)完成并存儲(chǔ)在傳感器的存儲(chǔ)器中。每個(gè)傳感器都有單獨(dú)的校準(zhǔn)參數(shù),。
時(shí)間
啟動(dòng)后以秒計(jì)算的時(shí)間,。
時(shí)間
m_conv_time
溫度
與原始溫度相同,尚未進(jìn)行處理,。
ConvTemp
m_conv_temp
Ax,Ay,,Az
經(jīng)過(guò)處理的加速度向量,,相對(duì)于傳感器的局部坐標(biāo)軸進(jìn)行測(cè)量,單位為m/s/s,。需要注意的是該向量包括重力在內(nèi),。
RawAccelX RawAccelY,RawAccelZ
m_conv_accX m_conv_accY,,m_conv_accZ
Mx,,My,Mz
標(biāo)準(zhǔn)化的磁力儀單位向量,,每個(gè)參數(shù)值范圍為1和-1之間,。向量是相對(duì)于傳感器的局部坐標(biāo)系統(tǒng)而測(cè)量。這僅僅是一個(gè)方向性的單位向量,,因此沒(méi)有任何單位,。
RawMagX RawMagY,RawMagZ
m_conv_magX m_conv_magY,,m_conv_magZ
Gx,,Gy,Gz
經(jīng)過(guò)處理的角速度向量,,相對(duì)于傳感器的局部坐標(biāo)軸測(cè)量,,單位為每秒度。這是一個(gè)角速度使用向量,。
RawGyroX RawGyroY,,RawGyroZ
m_conv_gyroX m_conv_gyroY,m_conv_gyroZ
處理后的數(shù)據(jù)
使用更復(fù)雜的算法生成更為準(zhǔn)確的額外參數(shù),,來(lái)自AmmSensor不同種類(lèi)傳感器的組合值,。這些算法包括整合、推導(dǎo)和一個(gè)復(fù)雜的卡爾曼濾波器。
加工時(shí)間
AmmSensor通信開(kāi)始后以秒為單位的時(shí)間,,與ConvTime相同
時(shí)間
m_proc_time
傳感器單位向量
這9個(gè)值給出傳感器在任何時(shí)間點(diǎn)的方向,,相對(duì)于全球參照幀。事實(shí)上,,每個(gè)傳感器的結(jié)束點(diǎn)坐標(biāo)值是內(nèi)部軸的標(biāo)準(zhǔn)化,,范圍在1和-1之間。全局參考坐標(biāo)系從重力向量和磁北向量創(chuàng)建,。
相對(duì)全局參考坐標(biāo)系測(cè)量的傳感器X軸坐標(biāo)終點(diǎn)是:
Xx,,Xy,Xz
m_proc_rotMat00 m_proc_rotMat10 m_proc_rotMat20
相對(duì)全局參考坐標(biāo)系測(cè)量的y軸坐標(biāo)終點(diǎn)是:
Yx,,Yy,,Yz
m_proc_rotMat01 m_proc_rotMat11 m_proc_rotMat21
相對(duì)全局參考坐標(biāo)系測(cè)量的z軸坐標(biāo)終點(diǎn)是:
Zx,Zy,,Zz
m_proc_rotMat02 m_proc_rotMat12 m_proc_rotMat22
四元數(shù)
為表示傳感器方向的另一種便捷方式,。該方法只使用4個(gè)組件而不是9個(gè)單位向量,因此更為緊湊,。更多信息請(qǐng)參閱維基百科,。
QuaternionW,QuaternionX QuaternionY,,QuaternionZ
m_proc_quatW,,m_proc_quatX m_proc_quatY,m_proc_quatZ
慣性直線加速度
這一向量是傳感器的線性加速度,,僅由運(yùn)動(dòng)所生成,,單位為m/s2。重力向量消減,。僅當(dāng)傳感器方向已知時(shí)才能完成該過(guò)程,,即我們知道重力(9.81m/s2)消減的位置。這樣才能準(zhǔn)確了解運(yùn)動(dòng)所單獨(dú)創(chuàng)建的加速度,。當(dāng)傳感器不移動(dòng)時(shí)該值應(yīng)為零,。該向量為相對(duì)于全局參考坐標(biāo)系測(cè)量。
InertialAccelX InertialAccelY,,InertialAccelZ
m_proc_globalAccX m_proc_globalAccY,,m_proc_globalAccZ
角加速度
角速度向量為差別化生成,測(cè)量單位為rad/s2,,有3個(gè)組成部分,。該向量為相對(duì)于傳感器局部坐標(biāo)軸測(cè)量。
AngularAccelX AngularAccelY,,AngularAccelZ
m_proc_gyroConvAccX m_proc_gyroConvAccY,,m_proc_gyroConvAccZ
線速度和線性位置
線速度(m/s)由慣線性加速度的整合而產(chǎn)生,,線性位置(m)來(lái)自線速度的整合。傳感器的初始位置認(rèn)為是原點(diǎn),,相對(duì)于全局參考坐標(biāo)系測(cè)量,。這些值會(huì)產(chǎn)生較大的整合偏移,在每次使用前應(yīng)提供復(fù)位功能,。
位置X,,位置Y,位置Z
m_proc_globalPosX m_proc_globalPosY,,m_proc_globalPosZ
LinearVelX LinearVelY,,LinearVelZ
m_proc_globalVelX m_proc_globalVelY,m_proc_globalVelZ
這些向量都會(huì)產(chǎn)生重大偏移,,具有邊際價(jià)值,。僅出于完整性目的提供這些數(shù)據(jù),不具有準(zhǔn)確性,。
全局參考坐標(biāo)系
Z軸為垂直指向
X軸為磁北方向指向
Y軸為垂直于X軸和Z軸指向西
X,,Y和Z軸為形成一個(gè)右手坐標(biāo)系
AmmSensor單位向量
該單位向量完整定義了AmmSensor局部坐標(biāo)系的方向??墒褂帽容^容易的方程將這些值轉(zhuǎn)換成各種方位角度類(lèi)型,包括歐拉角和關(guān)節(jié)角度值,。任何方程方面的疑問(wèn)請(qǐng)咨詢(xún)AMM解決,。
::應(yīng)用范圍::
適用于手部追蹤、儀器追蹤,、機(jī)械臂動(dòng)作捕捉等
::技術(shù)特征::
- 創(chuàng)建自己的創(chuàng)新3D動(dòng)作捕捉和分析應(yīng)用
- 實(shí)時(shí)讀取加速度,、角速度、磁場(chǎng)數(shù)據(jù)
- 直接從卡爾曼濾波器提取四元數(shù)或單位向量的傳感器方向數(shù)據(jù)
- 多個(gè)傳感器實(shí)現(xiàn)同時(shí)通信
- 通過(guò)固件命令控制AmmSensor的所有功能
- 讀取并寫(xiě)入傳感器的固件信息以及校準(zhǔn)數(shù)據(jù)
- 使用Visual Studio進(jìn)行任何Windows.Net語(yǔ)言編程
- (免版稅)Windows.Net兼容DLL
- 250Hz二進(jìn)制格式的數(shù)據(jù)傳輸,,用于快速動(dòng)作更新
- 簡(jiǎn)單的學(xué)習(xí)曲線VB演示程序
- 示例應(yīng)用程序存儲(chǔ)輸出為ASCII文本文件,,可自動(dòng)發(fā)送至一個(gè)電子表格




















































")
")


發(fā)工具包")
")


")

