目的
預(yù)防性人體工程學(xué)對(duì)于保護(hù)工人的健康和安全至關(guān)重要,因?yàn)檎J(rèn)識(shí)到人類的差異性也很重要,。本文的目的是描述一個(gè)基于 Unity 的應(yīng)用程序,,該應(yīng)用程序設(shè)計(jì)用于使用運(yùn)動(dòng)捕捉數(shù)據(jù)進(jìn)行三維姿勢(shì)分析和可視化。與虛擬現(xiàn)實(shí) (VR) 技術(shù)的集成使用戶能夠沉浸在模擬的工作環(huán)境中,,而無(wú)需物理原型,。擬議的應(yīng)用程序旨在促進(jìn)人體工程學(xué)原理在工作場(chǎng)所設(shè)計(jì)和評(píng)估中的應(yīng)用,以積極主動(dòng),、參與性和包容性的方式促進(jìn)工人福祉,。
作者開(kāi)發(fā)了一款利用動(dòng)作捕捉技術(shù)和 VR 技術(shù)的應(yīng)用程序,旨在幫助分析師對(duì)物理原型以及未來(lái)工作場(chǎng)所進(jìn)行人體工程學(xué)評(píng)估,。創(chuàng)新的姿勢(shì)預(yù)測(cè)模塊可幫助分析師從單個(gè)數(shù)據(jù)記錄中了解不同用戶在與工作場(chǎng)所互動(dòng)時(shí)可能采取的姿勢(shì),。
發(fā)現(xiàn)
一些案例研究說(shuō)明了所提議的應(yīng)用程序的功能,,展示了如何提供不同的信息以及如何在工業(yè)環(huán)境中支持工作場(chǎng)所分析師和設(shè)計(jì)師。
原創(chuàng)性/價(jià)值
本文深入介紹了汽車公司在應(yīng)用可穿戴傳感器和 VR 方面的經(jīng)驗(yàn)和研究,,以支持主動(dòng)和參與式的工作場(chǎng)所人體工程學(xué)方法,。
1.引言
新的信息和通信技術(shù)引入工廠環(huán)境正在推動(dòng)制造業(yè)發(fā)生深刻變革。智能工廠是德國(guó)政府于 2010 年設(shè)想的工業(yè) 4.0 的一個(gè)關(guān)鍵要素,,系統(tǒng)變得信息物理化,,相互交互,監(jiān)控和驗(yàn)證物理過(guò)程,,創(chuàng)建物理世界的虛擬副本并根據(jù)復(fù)雜的數(shù)據(jù)分析做出決策,,正在成為現(xiàn)實(shí)。這些概念正在徹底改變所有領(lǐng)域的工業(yè),,而汽車行業(yè)是其中的先行者之一,,也是參與度最高的行業(yè)之一。
制造過(guò)程的虛擬化和仿真在成本和時(shí)間方面具有多種優(yōu)勢(shì),,同時(shí)還可以優(yōu)化裝配線設(shè)計(jì)和研究人機(jī)交互,。利用技術(shù)創(chuàng)新在當(dāng)今的制造環(huán)境中至關(guān)重要,其特點(diǎn)是包含用戶,、機(jī)器和系統(tǒng)的復(fù)雜協(xié)作范式,。在設(shè)計(jì)階段融入人體工程學(xué)原理可以減輕不利后果,例如部署延遲,、質(zhì)量下降和最終系統(tǒng)的可用性降低,。它還有助于避免后續(xù)修改系統(tǒng)所需的額外成本。各種研究和行業(yè)趨勢(shì)都支持對(duì)人為因素的認(rèn)識(shí),。
在此背景下,,虛擬現(xiàn)實(shí) (VR) 是一項(xiàng)值得利用的關(guān)鍵研究技術(shù),它可以作為一種先進(jìn)的人機(jī)界面,,實(shí)時(shí)模擬現(xiàn)實(shí)世界并通過(guò)多種感官通道與數(shù)字對(duì)象進(jìn)行各種交互,。VR 可應(yīng)用于娛樂(lè)、醫(yī)藥,、文化,、營(yíng)銷、教育和文化遺產(chǎn)等各個(gè)領(lǐng)域,。近年來(lái),,一個(gè)特別值得注意的領(lǐng)域是工業(yè)原型設(shè)計(jì)。直到幾年前,,解決系統(tǒng)故障和事故的措施主要集中在降低風(fēng)險(xiǎn)因素上。然而,,三維 (3D) 設(shè)計(jì)軟件和虛擬模擬器的進(jìn)步現(xiàn)在使設(shè)計(jì)師能夠?qū)?VR 技術(shù)集成到設(shè)計(jì)過(guò)程中,,并在進(jìn)入物理原型設(shè)計(jì)階段之前在模擬環(huán)境中測(cè)試和驗(yàn)證工具,。
在虛擬環(huán)境中,可以使用數(shù)字人體模型(虛擬人體模型)模擬人與工作場(chǎng)所之間的交互,,而可以使用 CAD 模型導(dǎo)入工作場(chǎng)所和工作站,。人體模型是符合自然比例的人體形象的虛擬表示,可以通過(guò)正運(yùn)動(dòng)學(xué)或逆運(yùn)動(dòng)學(xué) (IK) 進(jìn)行控制和動(dòng)畫(huà)制作,。虛擬人體模型有多種應(yīng)用范圍,,其中許多符合個(gè)人、團(tuán)體和團(tuán)隊(duì)工作場(chǎng)所學(xué)習(xí)的原則:考慮在沉浸式虛擬現(xiàn)實(shí)中學(xué)習(xí)特定機(jī)械零件的裝配順序,,在尚未建造物理原型時(shí)為操作員提供培訓(xùn) ,。
本文旨在介紹一個(gè)基于 Unity 的工作場(chǎng)所設(shè)計(jì)和評(píng)估應(yīng)用程序,該應(yīng)用程序利用慣性測(cè)量單元 (IMU) 傳感器記錄運(yùn)動(dòng)數(shù)據(jù),。與 VR 技術(shù)的集成使用戶無(wú)需物理原型即可沉浸在模擬工作環(huán)境中,。該應(yīng)用程序旨在支持分析師通過(guò)可穿戴設(shè)備評(píng)估工作場(chǎng)所設(shè)計(jì),但也可用于在職培訓(xùn),。所展示應(yīng)用程序的一個(gè)創(chuàng)新功能是可以預(yù)測(cè)屬于與記錄運(yùn)動(dòng)捕捉數(shù)據(jù)的個(gè)人不同的人體測(cè)量百分位數(shù)的用戶的姿勢(shì),。識(shí)別人體變異是人體工程學(xué)的基礎(chǔ),以確保滿足小用戶的可達(dá)性和大用戶的身體空間問(wèn)題,,同時(shí)確保所有用戶的姿勢(shì)舒適度,。另一方面,組織幾次測(cè)試會(huì)議以包括不同身高的用戶既復(fù)雜又昂貴,。
本文分為幾個(gè)部分,。背景部分探討了基于傳感器和虛擬現(xiàn)實(shí)技術(shù)的自動(dòng)人體工程學(xué)評(píng)估的必要性,隨后是對(duì)作者設(shè)計(jì)的基于 Unity 的應(yīng)用程序的綜合描述,,該應(yīng)用程序旨在支持分析師評(píng)估工人在工作任務(wù)期間的姿勢(shì)和身體運(yùn)動(dòng),。然后介紹了對(duì)屬于人體測(cè)量百分位數(shù)(而不是記錄運(yùn)動(dòng)捕捉數(shù)據(jù)的個(gè)人的百分位數(shù))的用戶的姿勢(shì)預(yù)測(cè),并介紹了一些應(yīng)用案例,。最后,,討論了結(jié)論和未來(lái)工作。
2.背景
在工人平均年齡穩(wěn)步增長(zhǎng),、生產(chǎn)率要求不斷提高的當(dāng)今世界,,人體工程學(xué)面臨的一個(gè)重大挑戰(zhàn)是如何通過(guò)設(shè)計(jì)一個(gè)能夠保護(hù)肌肉骨骼健康的工作環(huán)境來(lái)改善員工的福祉。肌肉骨骼疾病 (MSD) 影響著歐洲各地?zé)o數(shù)工人,,他們?cè)馐芗∪?、神?jīng)、肌腱,、關(guān)節(jié)和脊椎間盤(pán)的損傷和疾病,。這些健康問(wèn)題包括疼痛以及可能導(dǎo)致工作日損失的更嚴(yán)重的疾病。因此,,解決工作場(chǎng)所設(shè)計(jì)問(wèn)題具有雙重意義:改善工人的福祉和提高生產(chǎn)率,。
肌筋膜炎的危險(xiǎn)因素包括重復(fù)性動(dòng)作,、不良姿勢(shì)和搬運(yùn)重物。肌筋膜炎是最常見(jiàn)的工作相關(guān)疾病之一,,占?xì)W洲職業(yè)病的 45% 左右,。在整個(gè)歐洲,肌筋膜炎影響著數(shù)百萬(wàn)工人,,給雇主造成數(shù)十億歐元的損失,。職業(yè)病和危害還可以與更普遍的健康狀況指標(biāo)以及人口工作條件有關(guān)。國(guó)家法律規(guī)定了如何評(píng)估工作條件,。因此,,公司對(duì)建立有效和高效的工作場(chǎng)所設(shè)計(jì)方法的興趣是顯而易見(jiàn)的。將工作站設(shè)計(jì)過(guò)程定義為“導(dǎo)致工作場(chǎng)所誕生的活動(dòng)”,。設(shè)計(jì)工作場(chǎng)所時(shí)要考慮的主要問(wèn)題之一是適應(yīng)生產(chǎn)變化,;靈活性對(duì)于滿足市場(chǎng)需求至關(guān)重要。以人為本的工作場(chǎng)所概念的出現(xiàn)是為了解決這一問(wèn)題,,概述了在工作場(chǎng)所設(shè)計(jì)過(guò)程中納入人體工程學(xué)原則的必要性,。
一些人體工程學(xué)評(píng)估方法都是觀察性方法,主要研究姿勢(shì)分析,,例如 Ovako 工作姿勢(shì)分析系統(tǒng),、快速上肢評(píng)估或快速全身評(píng)估。通常,,這些方法用于以被動(dòng)的方式評(píng)估現(xiàn)有的工作環(huán)境以應(yīng)對(duì)人體工程學(xué),。物理原型的高成本大大降低了主動(dòng)解決人體工程學(xué)問(wèn)題的可能性,而主動(dòng)解決人體工程學(xué)問(wèn)題的目標(biāo)恰恰是在工作場(chǎng)所出現(xiàn)潛在問(wèn)題之前就發(fā)現(xiàn)它們,。
VR 技術(shù)正在成為主動(dòng)人體工程學(xué)的關(guān)鍵工具,,因?yàn)樗鼈兛梢詭椭ぷ鲌?chǎng)所設(shè)計(jì)師克服這一限制,使開(kāi)發(fā)人員能夠在沉浸式環(huán)境中以 1:1 的等效比例可視化工作站的所有元素,。此外,,VR 解決方案與動(dòng)作捕捉 (MoCap) 技術(shù)相結(jié)合以顯示工人的動(dòng)作和姿勢(shì)時(shí)可能會(huì)帶來(lái)收益。Menolotto對(duì)不同的 MoCap 技術(shù)以及與數(shù)據(jù)管理和處理相關(guān)的問(wèn)題進(jìn)行了系統(tǒng)的文獻(xiàn)綜述,。
將人體工程學(xué)原理,、VR 和 MoCap 解決方案相結(jié)合,實(shí)現(xiàn)以人為本的工作場(chǎng)所設(shè)計(jì)的總體優(yōu)勢(shì)可總結(jié)如下:實(shí)驗(yàn)和模擬的可重復(fù)性,;記錄和處理實(shí)驗(yàn)數(shù)據(jù)的可能性,;靈活地創(chuàng)建能夠響應(yīng)市場(chǎng)需求同時(shí)尊重現(xiàn)有標(biāo)準(zhǔn)的環(huán)境;實(shí)時(shí)進(jìn)行人體工程學(xué)評(píng)估的可能性,。多篇論文研究了集成 VR-MoCap 系統(tǒng)相對(duì)于傳統(tǒng)計(jì)算機(jī)輔助解決方案的優(yōu)勢(shì),。系統(tǒng)的文獻(xiàn)綜述可參見(jiàn)da Silva等人(2020)的文章。Simonetto提出了一個(gè)方法框架,,使裝配系統(tǒng)的設(shè)計(jì)人員能夠考慮到工人因年齡等原因而產(chǎn)生的不同體力和關(guān)節(jié)活動(dòng)性,。3.建議的應(yīng)用:系統(tǒng)架構(gòu)和工作流程
本節(jié)對(duì)所提出的基于 Unity 的應(yīng)用程序和系統(tǒng)工作流程進(jìn)行了綜合描述,。所提出的應(yīng)用程序利用 MoCap 和 VR 技術(shù)的集成,通過(guò)一系列功能支持分析師對(duì)物理原型和未來(lái)工作場(chǎng)所進(jìn)行人體工程學(xué)評(píng)估,,其中包括:通過(guò)運(yùn)動(dòng)捕捉數(shù)據(jù)執(zhí)行 3D 姿勢(shì)分析,提供虛擬現(xiàn)實(shí)環(huán)境,,以評(píng)估工人與工作站之間的交互,,同時(shí)監(jiān)測(cè)姿勢(shì)指標(biāo)并估計(jì)不同人體百分位數(shù)工人的身體姿勢(shì)和動(dòng)作。這些功能將在下文簡(jiǎn)要介紹,。3.1?.用于三維姿勢(shì)分析的 MoCap 系統(tǒng)
姿勢(shì)舒適度對(duì)于工人的健康和以人為本的工作場(chǎng)所設(shè)計(jì)至關(guān)重要,。傳統(tǒng)上,訓(xùn)練有素的分析師會(huì)觀察工人,,并通過(guò)估計(jì)所分析工作活動(dòng)的視頻或圖片中的投影角度來(lái)評(píng)估關(guān)節(jié)角度,。主觀觀察很耗時(shí),并且可能存在觀察者之間和觀察者內(nèi)部的差異,。近年來(lái),,可穿戴傳感器已證明具有足夠的精度來(lái)評(píng)估姿勢(shì)和身體運(yùn)動(dòng)并進(jìn)行定量人體工程學(xué)評(píng)估。當(dāng)工人在裝配線上或物理原型上執(zhí)行任務(wù)時(shí),,可以記錄數(shù)據(jù),,即使在長(zhǎng)時(shí)間操作期間也可以提供有關(guān)不同關(guān)節(jié)位置的寶貴信息。
Carnazzo提出了一種 3D 姿勢(shì)分析算法,,該算法直接從安裝在工人身上的可調(diào)節(jié)帶子的 IMU 收集數(shù)據(jù)(圖 1),,并通過(guò)反三角函數(shù)自主計(jì)算身體部位之間的角度。根據(jù)相關(guān)標(biāo)準(zhǔn) EN 1005–4和 ISO 11226定義了頸部,、軀干,、肩部、肘部,、手腕和膝蓋的不同身體角度,,這些標(biāo)準(zhǔn)規(guī)定了工作姿勢(shì)的可接受角度和保持時(shí)間,并構(gòu)成了風(fēng)險(xiǎn)評(píng)估方法的基礎(chǔ),。為了方便分析人員查看和檢索信息,,我們特別注重創(chuàng)建直觀、直接的用戶界面,。在系統(tǒng)啟動(dòng)時(shí),,分析人員可以選擇顯示實(shí)時(shí)捕獲的動(dòng)作捕捉數(shù)據(jù)的模式或分析預(yù)先記錄的數(shù)據(jù),并可以使用 RGB 攝像機(jī)和 IMU 運(yùn)動(dòng)跟蹤系統(tǒng)同步記錄工作活動(dòng),。對(duì)于手動(dòng)數(shù)據(jù)同步,,佩戴 IMU 傳感器的用戶只需拍手即可啟動(dòng)記錄階段。
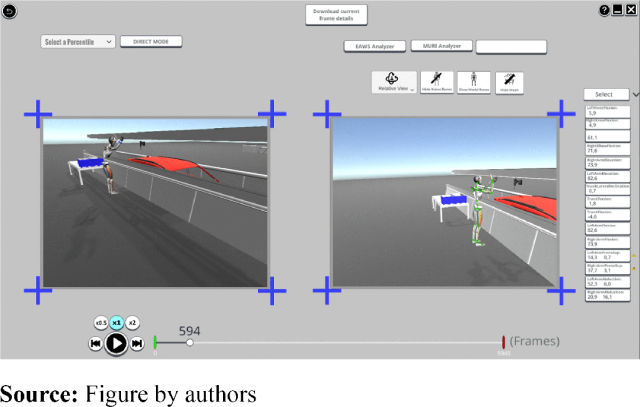
圖2是用于分析預(yù)先記錄的數(shù)據(jù)的用戶界面示例,。分析人員可以選擇不同的視圖和人體模型表示類型,,即僅使用連接代表關(guān)節(jié)的球體的線來(lái)可視化內(nèi)部運(yùn)動(dòng)鏈(綠色火柴人),、完整的 3D 人形或兩者的疊加。該應(yīng)用程序允許保存在特定時(shí)間范圍內(nèi)顯示的所有角度信息,。具體而言,,通過(guò)圖形界面上的按鈕,分析人員可以保存所有顯示模式下的姿勢(shì)角度,、視頻捕獲和虛擬場(chǎng)景的所有值,。此信息存儲(chǔ)在 HTML 格式的文件中,可能包括分析人員輸入的文本注釋,。圖 3顯示了關(guān)節(jié)角度可視化的圖形用戶界面,。下拉菜單允許選擇可在屏幕上顯示的姿勢(shì)角度??梢苑治鍪畟€(gè)不同的角度:頸部,、軀干、肩部,、肘部,、手腕和膝蓋。這些角度的識(shí)別是許多風(fēng)險(xiǎn)評(píng)估方法的基礎(chǔ),。用于動(dòng)作捕捉的可穿戴傳感器是研究和自動(dòng)化人體工程學(xué)評(píng)估中極具潛力的工具,。然而,物理原型成本高昂,,并且需要花費(fèi)大量時(shí)間來(lái)構(gòu)建,。如背景部分所述,虛擬化的一個(gè)有趣發(fā)展是將動(dòng)作捕捉技術(shù)與 VR 技術(shù)相結(jié)合,。頭戴式顯示器提供的視覺(jué)反饋允許記錄用戶與虛擬環(huán)境交互時(shí)的姿勢(shì)和動(dòng)作,。得益于 VR 技術(shù),在沒(méi)有工作站物理原型的情況下,,姿勢(shì)指標(biāo)和風(fēng)險(xiǎn)評(píng)估成為可能,。圖4描繪了所提出的軟件和硬件架構(gòu)的方案。姿勢(shì)數(shù)據(jù)通過(guò) Xsens Awinda 運(yùn)動(dòng)捕捉系統(tǒng)記錄,,該系統(tǒng)包括 17 個(gè)無(wú)線 IMU 傳感器,,通過(guò)可調(diào)節(jié)的帶子安裝在用戶身上,并通過(guò) Xsens MVN 軟件轉(zhuǎn)發(fā)到 Unity 應(yīng)用程序,。Xsens 軟件開(kāi)發(fā)套件用于正確管理 Unity 應(yīng)用程序內(nèi)的數(shù)據(jù),。捕捉系統(tǒng)向 Unity 應(yīng)用程序提供傳感器相對(duì)于地球參考局部框架的精確 3D 方向。Unity 被選為全球領(lǐng)先的游戲引擎,,用于在多個(gè)平臺(tái)和設(shè)備上創(chuàng)建和部署沉浸式體驗(yàn),,所提出的人體工程學(xué)分析算法是用 C# 編寫(xiě)的。評(píng)估過(guò)程可能需要或不需要護(hù)目鏡,這取決于模擬是在虛擬還是在現(xiàn)場(chǎng)進(jìn)行,。虛擬現(xiàn)實(shí)模擬使用的技術(shù)是護(hù)目鏡,,特別是 HTC VIVE 頭戴式顯示器。用戶可以通過(guò)佩戴帶有運(yùn)動(dòng)跟蹤傳感器的 HMD 頭盔來(lái)查看 3D 立體圖像并在視覺(jué)世界中確定自己的空間位置,。在某些應(yīng)用中,,耳機(jī)與 Leap Motion 控制器相結(jié)合,這是一種光學(xué)手部跟蹤系統(tǒng),,允許用戶通過(guò)手部動(dòng)作來(lái)操縱數(shù)字對(duì)象,。圖5左側(cè)顯示了配備 Xsens Awinda 系統(tǒng)、HTC VIVE HMD 和 Leap Motions 控制器的用戶圖像,,右側(cè)顯示了其在虛擬環(huán)境中的虛擬表示。人體模型(以下將稱為 Xsens 人體模型)復(fù)制了記錄會(huì)話中使用的用戶的人體測(cè)量尺寸,。人體模型的動(dòng)作和姿勢(shì)基于運(yùn)動(dòng)捕捉系統(tǒng)記錄的數(shù)據(jù),。3.3?.使用不同人體測(cè)量百分位數(shù)進(jìn)行姿勢(shì)預(yù)測(cè)身體姿勢(shì)和姿勢(shì)角度是工人體型的特征。然而,,認(rèn)識(shí)到人體的多樣性是人體工程學(xué)的關(guān)鍵,。動(dòng)作捕捉和虛擬現(xiàn)實(shí)技術(shù)可以幫助預(yù)測(cè)不同體型的用戶在工作站驗(yàn)證的早期階段如何與給定的工作站交互,并確保工作站滿足大多數(shù)用戶的安全和舒適要求,。在汽車領(lǐng)域,,與許多其他領(lǐng)域一樣,通常參考男性和女性的第 5,、50 和 95 個(gè)百分位數(shù)(即 P5,、P50 和 P95),以適應(yīng)大多數(shù)勞動(dòng)人口,。然而,,對(duì)不同體型的用戶重復(fù)數(shù)據(jù)記錄會(huì)話既費(fèi)時(shí)又費(fèi)錢(qián)。因此,,對(duì)于公司來(lái)說(shuō),,能夠使用記錄在單個(gè)用戶身上的數(shù)據(jù)來(lái)估計(jì)不同身高的用戶在與同一工作環(huán)境交互時(shí)可能采取的姿勢(shì)是非常有意義的。提前評(píng)估不同身高工人的姿勢(shì)風(fēng)險(xiǎn)對(duì)于確保滿足所有用戶的姿勢(shì)舒適度,、小用戶的可達(dá)性需求和大用戶的身體空間問(wèn)題非常重要,。可以使用 IK 引擎預(yù)測(cè)任何給定時(shí)間的數(shù)字人體模型的姿勢(shì),,結(jié)合經(jīng)驗(yàn)豐富的人體工程學(xué)專家定義的姿勢(shì)規(guī)則,,可以預(yù)測(cè)數(shù)字人體模型的運(yùn)動(dòng)。IK 的概念起源于機(jī)器人領(lǐng)域,,特別是為了解決將機(jī)械臂定位在特定的預(yù)定義位置的問(wèn)題,。運(yùn)動(dòng)鏈?zhǔn)怯申P(guān)節(jié)連接的剛性部件的排列,就像人體骨骼系統(tǒng)一樣,并提供受約束的運(yùn)動(dòng),。IK 求解器可能會(huì)根據(jù)關(guān)節(jié)約束找到人體模型姿勢(shì)問(wèn)題的多種解決方案,,如果目標(biāo)點(diǎn)無(wú)法到達(dá),則可能找不到解決方案,。圖6描述了所提出的姿勢(shì)預(yù)測(cè)應(yīng)用程序的一般功能,。為了使系統(tǒng)正常工作,需要進(jìn)行初步的運(yùn)動(dòng)捕捉會(huì)話,。IMU 傳感器記錄的數(shù)據(jù)被導(dǎo)出到 Unity,,用戶的動(dòng)作在那里被復(fù)制。直接模式操作允許分析師直接控制人體模型的手,、腳,、臀部、肩膀(左右)和骨盆的效應(yīng)器,,以防分析師希望糾正某些姿勢(shì)或缺少某些數(shù)據(jù),。姿勢(shì)預(yù)測(cè)算法是使用 Final IK 開(kāi)發(fā)的,它是 Unity 的領(lǐng)先 IK 庫(kù),,在視頻游戲制作中被廣泛采用,。這個(gè) Unity IK 插件提供了各種模塊:FullBodyBiped IK 用于為人體化身制作動(dòng)畫(huà),而 LookAt IK 組件用于幫助將人體模型的頭部旋轉(zhuǎn)到目標(biāo)點(diǎn),。這些模塊已擴(kuò)展為基于人體模型的附加人體工程學(xué)姿勢(shì)規(guī)則,,該規(guī)則可根據(jù)雙腳的位置和手部的工作點(diǎn)預(yù)測(cè)工人最可能采取的姿勢(shì)。該系統(tǒng)的好處是可以比較屬于不同百分位數(shù)的人體模型的預(yù)測(cè)姿勢(shì),,從而驗(yàn)證適用于各種用戶的工作站,,同時(shí)考慮到所有用戶的姿勢(shì)舒適度以及 P5 人體模型的可達(dá)性需求以及 P95 的身體空間問(wèn)題。所提出的基于 Unity 的集成 MoCap 和 VR 技術(shù)的應(yīng)用程序已應(yīng)用于各種用例,,也可供分析師評(píng)估其有效性和可用性,。圖7中重現(xiàn)的任務(wù)是車頂行李架組裝,其中工人必須將車頂行李架放置在汽車車頂上并用螺釘和支架固定,。從人體工程學(xué)風(fēng)險(xiǎn)評(píng)估和操作員培訓(xùn)的角度來(lái)看,,這是一項(xiàng)非常有趣的任務(wù)。在汽車車頂上組裝元件可能需要工人采取不協(xié)調(diào)的姿勢(shì),,雙手高于肩膀高度,。此外,可能還存在到達(dá)汽車車頂內(nèi)部點(diǎn)的問(wèn)題,。因此,,這項(xiàng)任務(wù)可能值得事先虛擬分析,考慮到不同身高的工人,,以及通過(guò)改善可達(dá)性來(lái)創(chuàng)建一個(gè)提升工人的平臺(tái)的可能性,。值得注意的是,車頂行李架組裝需要按照特定順序執(zhí)行一系列操作,操作員必須學(xué)會(huì)重復(fù)這些操作,,而且這需要良好的靈活性,。在這方面,VR 環(huán)境提供了在職培訓(xùn)的可能性,,讓工人沉浸在執(zhí)行工作任務(wù)的任務(wù)環(huán)境中,,讓他或她不僅可以練習(xí),還可以就工作場(chǎng)所和工作任務(wù)的設(shè)計(jì)提供反饋,。第二步,,將 HTC VIVE HMD 與 Leap Motion 控制器集成,以更好地模擬抓取物體的動(dòng)作,,從而實(shí)現(xiàn)手與物體的交互(圖5),。對(duì)代表不同身高的用戶(即 P5、P50 和 P95 女性和男性百分位數(shù))進(jìn)行動(dòng)作捕捉記錄會(huì)話,,以突出預(yù)測(cè)系統(tǒng)中的關(guān)鍵問(wèn)題,。圖8重現(xiàn)了 Unity 中用于模擬的虛擬工作站,而圖9則顯示了分析師分析記錄數(shù)據(jù)的用戶界面,。右側(cè)的人體模型是 Xsens 人體模型,它使用從運(yùn)動(dòng)捕捉會(huì)話中獲得的信息復(fù)制工人的姿勢(shì),,而左側(cè)的人體模型則由姿勢(shì)預(yù)測(cè)系統(tǒng)擺出姿勢(shì)(下文中將稱為 Final IK 人體模型),。菜單允許分析師通過(guò)直接輸入人體測(cè)量數(shù)據(jù)或選擇姿勢(shì)預(yù)測(cè)的目標(biāo)百分位數(shù)來(lái)更改人體模型的大小。如果沒(méi)有選擇百分位數(shù),,則系統(tǒng)默認(rèn)使用 P50 男性人體模型運(yùn)行,。菜單還允許分析師更改相機(jī)方向并確保正確查看兩個(gè)人體模型。通過(guò)將工作環(huán)境的數(shù)字孿生導(dǎo)入 Unity 場(chǎng)景,,分析師可以直觀地看到人體模型在場(chǎng)景中的移動(dòng)方式,,系統(tǒng)可以檢測(cè)到與物體的潛在碰撞并相應(yīng)地調(diào)整人體模型的姿勢(shì)。對(duì)于任何 IK 解算器來(lái)說(shuō),,一個(gè)重大挑戰(zhàn)是重現(xiàn)逼真的姿勢(shì),。Unity 中提供的 IK 引擎旨在用于游戲,并返回可能未正確考慮工作中的人體工程學(xué)原理的姿勢(shì),。典型的例子是,,到達(dá)靠近地面的工作點(diǎn)可能需要背部向前彎曲,但應(yīng)該涉及彎曲膝蓋(圖10a)或與要執(zhí)行的工作相關(guān)的視覺(jué)需求,,而這些需求經(jīng)常被 IK 引擎忽略(圖10b),。為了克服這些限制,根據(jù)公司專業(yè)人體工程學(xué)專家的經(jīng)驗(yàn),,考慮了額外的姿勢(shì)規(guī)則,。
這些附加規(guī)則提高了姿勢(shì)預(yù)測(cè)模塊在不同百分位數(shù)上的有效性,因?yàn)樗峭ㄟ^(guò)比較姿勢(shì)預(yù)測(cè)模塊返回的關(guān)節(jié)角度和運(yùn)動(dòng)捕捉系統(tǒng)返回的關(guān)節(jié)角度來(lái)評(píng)估的。對(duì)任務(wù)期間出現(xiàn)的最相關(guān)姿勢(shì)進(jìn)行了更有針對(duì)性的分析,。對(duì)于每個(gè)選定的姿勢(shì),,比較了不同的關(guān)節(jié)角度。圖11左側(cè)描繪了 P5 男性人體模型的姿勢(shì),,重現(xiàn)了進(jìn)行動(dòng)作捕捉記錄的用戶的人體測(cè)量數(shù)據(jù),,右側(cè)描繪了 P95 男性的預(yù)測(cè)姿勢(shì)。即使記錄是在不同的百分位數(shù)上進(jìn)行的,,姿勢(shì)預(yù)測(cè)模塊也會(huì)返回逼真的姿勢(shì),。系統(tǒng)認(rèn)識(shí)到,較高的用戶需要向前彎曲背部才能達(dá)到相同的工作點(diǎn),,并彎曲脖子以縮短觀看距離,。圖11上重現(xiàn)的P95的預(yù)期姿勢(shì)是根據(jù)與實(shí)施的人體工程學(xué)規(guī)則相關(guān)的姿勢(shì)策略確定的。公司感興趣的另一個(gè)方面是不同身高的工人與工作站中可能存在的障礙物的互動(dòng),。例如,,一種可能的情況是工作底盤(pán)。由于沒(méi)有實(shí)驗(yàn)測(cè)試包括工人與工作站物品之間的碰撞,,因此通過(guò)提供目標(biāo)坐標(biāo)來(lái)完成避障系統(tǒng)的驗(yàn)證,。在這個(gè)初步評(píng)估階段,該系統(tǒng)被證明能夠檢測(cè)與物體的碰撞,。人體模型為處理與障礙物的互動(dòng)而采取的姿勢(shì)策略是合理的(圖12),。?
5.結(jié)論和未來(lái)工作
本文介紹了一款基于 Unity 的應(yīng)用程序,該應(yīng)用程序利用可穿戴傳感器和虛擬現(xiàn)實(shí)技術(shù),,并介紹了該應(yīng)用程序如何以主動(dòng)的方式在設(shè)計(jì)早期階段促進(jìn)人體工程學(xué)原理的應(yīng)用,。該應(yīng)用程序支持分析師進(jìn)行工作場(chǎng)所設(shè)計(jì)和評(píng)估以及風(fēng)險(xiǎn)評(píng)估工具的應(yīng)用。關(guān)節(jié)角度根據(jù)相關(guān)技術(shù)標(biāo)準(zhǔn)計(jì)算,,分析師可以將其用作風(fēng)險(xiǎn)評(píng)估工具的輸入數(shù)據(jù),,從而消除了通常與主觀觀察相關(guān)的觀察者間和觀察者內(nèi)的差異。創(chuàng)新的姿勢(shì)預(yù)測(cè)模塊可幫助分析師預(yù)測(cè)屬于不同人體測(cè)量百分位數(shù)的用戶在與給定工作站交互時(shí)可能的身體姿勢(shì),,該工作站可以是物理原型或 VR 中的模擬環(huán)境,。認(rèn)識(shí)到人體的多樣性是人體工程學(xué)的基礎(chǔ),它確保滿足所有用戶的姿勢(shì)舒適度,,滿足小用戶的可達(dá)性需求,,以及大用戶的身體空間問(wèn)題。未來(lái)的工作將側(cè)重于提高從單個(gè)數(shù)據(jù)記錄中預(yù)測(cè)各種用戶的姿勢(shì)的準(zhǔn)確性,,特別是在工作場(chǎng)所存在障礙物等特殊情況下,。工人可能會(huì)采用多種策略來(lái)執(zhí)行任務(wù),事實(shí)上,,任何姿勢(shì)預(yù)測(cè)系統(tǒng)的主要復(fù)雜性恰恰在于 IK 問(wèn)題的不確定性,。為了解決 IK 問(wèn)題的不確定性,,可以以姿勢(shì)規(guī)則的形式添加約束,這可能與任務(wù)的性質(zhì)和工作站的組織有關(guān),。這些姿勢(shì)規(guī)則最初可以根據(jù)專業(yè)人體工程學(xué)專家的經(jīng)驗(yàn)來(lái)定義,,但隨著數(shù)據(jù)量的增加,可以通過(guò)機(jī)器學(xué)習(xí)技術(shù)進(jìn)行改進(jìn),。基于良好人體工程學(xué)的姿勢(shì)規(guī)則的實(shí)施應(yīng)該成為工作站設(shè)計(jì)和評(píng)估過(guò)程中預(yù)防工作相關(guān)肌肉骨骼疾病的任何支持工具的基礎(chǔ),,也應(yīng)成為在職培訓(xùn)、員工參與度和工作環(huán)境中的表現(xiàn)的基礎(chǔ),。可穿戴傳感器和 VR 是主動(dòng)研究人體工程學(xué)的關(guān)鍵工具,,因?yàn)樗鼈兪浅两教摂M環(huán)境中的在職培訓(xùn)工具??捎玫?VR 系統(tǒng)可確保沉浸式和交互式環(huán)境:還可以通過(guò)觸覺(jué)設(shè)備為用戶提供對(duì)其動(dòng)作的觸覺(jué)和力量反應(yīng),。如今,在實(shí)現(xiàn)這些虛擬環(huán)境時(shí)可以達(dá)到的邏輯和圖形復(fù)雜度使得 VR 的使用范圍可以擴(kuò)展到姿勢(shì)負(fù)荷評(píng)估之外,。心理負(fù)荷評(píng)估變得越來(lái)越重要,,VR 在認(rèn)知負(fù)荷研究中的應(yīng)用也比以往任何時(shí)候都更加重要。這些技術(shù)在工作場(chǎng)所學(xué)習(xí)方面的巨大潛力不僅涉及工人,,還涉及分析師和設(shè)計(jì)師,。工作場(chǎng)所分析師和設(shè)計(jì)師可以按照“假設(shè)”方法在虛擬環(huán)境中探索不同的場(chǎng)景,并且可以在設(shè)計(jì)早期階段獲得設(shè)計(jì)選擇和評(píng)估方面的支持,。他們還可以從工人那里獲得有關(guān)工作場(chǎng)所設(shè)計(jì)的重要反饋,,而無(wú)需物理原型,并確保真正參與式的設(shè)計(jì)方法,。不同利益相關(guān)者的參與是人體工程學(xué)的基礎(chǔ),,對(duì)于確保高效和包容的工作場(chǎng)所必不可少,。
這項(xiàng)工作是兩年期項(xiàng)目 IM.PR.ES.SED(可穿戴設(shè)備的沉浸式人體工程學(xué)過(guò)程)的一部分,,該項(xiàng)目由 Stellantis(意大利 FCA)協(xié)調(diào),與都靈理工大學(xué),、坎帕尼亞大學(xué) Luigi Vanvitelli,、都靈 CIM4.0(工業(yè)制造 4.0 能力)合作提供技術(shù)和開(kāi)發(fā)咨詢,并與 Mare Digital 合作提供沉浸式現(xiàn)實(shí)工具,。搜維爾科技與Varjo總部簽署代理合作協(xié)議,,成為其在中國(guó)大陸地區(qū)的獨(dú)家授權(quán)代理經(jīng)銷商。搜維爾科技現(xiàn)支持Varjo頭戴式顯示器相關(guān)產(chǎn)品購(gòu)買(mǎi),、咨詢與售后支持等服務(wù),,歡迎垂詢。


作捕捉系統(tǒng)Awinda版")
作捕捉系統(tǒng)Awinda版")
作捕捉系統(tǒng) Link版")
作捕捉系統(tǒng) Link版")
據(jù)手套")