燃料:超級(jí)酒精E85
理論
MTi-G可以輸出三維定位,、三維位置、三維速度以及三維校正慣性數(shù)據(jù),,包括實(shí)時(shí)加速度和角速度等,。通過(guò)使用這些數(shù)據(jù),可以從MTi-G測(cè)量設(shè)備得出下列賽車參數(shù):
過(guò)度轉(zhuǎn)向和轉(zhuǎn)向不足
過(guò)度轉(zhuǎn)向和轉(zhuǎn)向不足可以通過(guò)MTi-G的DiffGyro數(shù)據(jù)進(jìn)行判定,。DiffGyro是陀螺儀測(cè)量出的軌道轉(zhuǎn)彎率與汽車轉(zhuǎn)彎速度之間的差值,。在DiffGyro信號(hào)的基礎(chǔ)上,我們分析處在各圈中車輛轉(zhuǎn)向的情況,。
如果速度除以半徑,,減去車輛的轉(zhuǎn)率(Gz),也可以計(jì)算出DiffGyro參數(shù),。DiffGyro參數(shù)可以測(cè)定出過(guò)度轉(zhuǎn)向或轉(zhuǎn)向不足的問題,。

圖3 如DiffGyro小于0,則車輛為過(guò)渡轉(zhuǎn)向,;
如DiffGyro大于0,,則車輛為轉(zhuǎn)向不足。
圖3:過(guò)度轉(zhuǎn)向的情況,。賽車的轉(zhuǎn)彎速度可以通過(guò)陀螺儀速率測(cè)出,,彎道速度是采用MTi-G設(shè)備通過(guò)全球定位系統(tǒng)數(shù)值計(jì)算得出。DiffGyro小于零或陀螺儀轉(zhuǎn)彎速度高于賽道的彎道速度,。θ是汽車在重心的滑移角,。
滑移角(圖3)
滑移角(θ)在GPS天線的位置給出,由設(shè)備的前進(jìn)(與車輛方向?qū)R)與軌道的切數(shù)(由速度向量V得出)差異得出,??梢允褂霉?VB = VA + BA ˄ W)計(jì)算出賽車任何點(diǎn)的滑移角,,因?yàn)镸Ti-G提供了全部動(dòng)態(tài)信息以確定與GPS天線相應(yīng)距離的速度向量。
軌道半徑
在轉(zhuǎn)彎率W已知的情況下,,軌道半徑R可以使用R =速度(V)/轉(zhuǎn)彎率(W)的公式輕松計(jì)算得出,。
加速度和方向?qū)傩?/STRONG>
MTi-G輸出的方向數(shù)據(jù)包括滾動(dòng)的傾斜。因此,,該設(shè)備的原始數(shù)據(jù),,如Ax、Ay和Gz,,可以在水平面上進(jìn)行輕松修正,。修正在計(jì)算Ax、Ay,、Gz時(shí)進(jìn)行,。
結(jié)果
從MTi-G數(shù)據(jù)得出如下結(jié)論:
過(guò)度轉(zhuǎn)向和轉(zhuǎn)向不足
使用轉(zhuǎn)彎速度和加速度來(lái)計(jì)算DiffGyro值。圖4顯示了指定圈內(nèi)DiffGyro值的二維圖,,表示了汽車和/或司機(jī)的方向盤行為,。
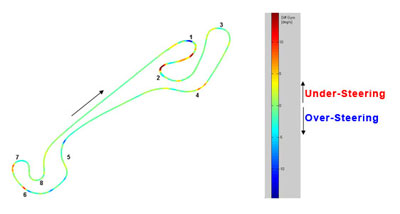
圖4
由這張圖可以迅速注意到以下幾點(diǎn):
一些轉(zhuǎn)向不足現(xiàn)象發(fā)生在第四曲線,即,,“剎車和100%油門”曲線,。因此,司機(jī)在入口處應(yīng)該有一個(gè)過(guò)度轉(zhuǎn)向(如曲線5所示),。相反,,則司機(jī)應(yīng)轉(zhuǎn)向不足,這意味著提早剎車,。有一種轉(zhuǎn)向不足的曲線2是最嚴(yán)格的一個(gè)地段,。這意味著駕駛者不進(jìn)行轉(zhuǎn)向,可能是因?yàn)槠嚊]有調(diào)整好這個(gè)曲線,??梢苑治霾煌能囕v設(shè)置,調(diào)查如何影響結(jié)果,。
確定最佳的比賽線路
理想的比賽線路可從剎車和加速狀態(tài)分析得出,,駕駛軌道由MTi-G數(shù)據(jù)得出。在此例中,,圖4種的曲線1值得特別研究,。
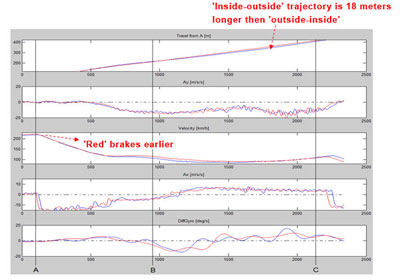
圖5
圖5顯示了數(shù)據(jù)采集圖(從MTi-G數(shù)據(jù)單獨(dú)提取),,與曲線1軌道上相應(yīng)的點(diǎn)A,、B和C。 X軸顯示了A的樣本數(shù)量(直接與時(shí)間有關(guān):樣本速率為200Hz),。圖5是曲線1加速的平面圖,,其中司機(jī)測(cè)試了連續(xù)兩圈中兩個(gè)不同的軌跡(“由內(nèi)到外”和“由外到內(nèi)”),。
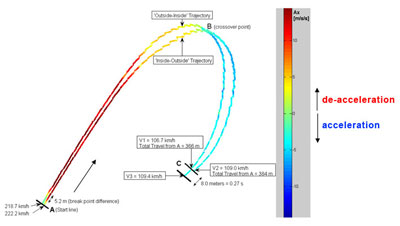
圖6
使用MTi-G數(shù)據(jù),可以計(jì)算出剎車點(diǎn)的精確位置和兩個(gè)剎車點(diǎn)之間的精確距離:5.2米(“由外到內(nèi)”軌跡必須提前剎車,,首先是為了趕上的彎道內(nèi)側(cè),,其次是因?yàn)锳點(diǎn)的進(jìn)入速度較高)。MTi-G與兩個(gè)軌跡的對(duì)應(yīng)時(shí)間是完全一致的,。因此,,可以立即推斷出,,由內(nèi)到外的線路比由外到內(nèi)的線路速度更快,,因?yàn)樵谕粫r(shí)間內(nèi),司機(jī)多行駛了8.0米,。如果采用由內(nèi)到外線路,,司機(jī)可以節(jié)省0.27秒時(shí)間。由內(nèi)到外的線路更像是一個(gè)V字型方程式軌跡,,曲線內(nèi)部的第二個(gè)軌跡更加平滑,。這可以通過(guò)計(jì)算軌道半徑(B點(diǎn)周圍)的最低值來(lái)判定:37.7米,另一個(gè)則為40.4米,。
僅從圖6所采集到的數(shù)據(jù)來(lái)看,,‘內(nèi)-外’軌道中C點(diǎn)的速度看起來(lái)有點(diǎn)高,這是因?yàn)樗菚r(shí)間的函數(shù):在C點(diǎn)有一個(gè)0.27秒的延遲對(duì)應(yīng)8.0米的路程,。所以C點(diǎn)的速度即V3應(yīng)該是109.4公里/小時(shí),,而不是106.7公里/每小時(shí)(見圖5)。有趣的是,,由外到而內(nèi)的軌跡中,,B點(diǎn)的速度加快,從而以更快的109.0公里/小時(shí)的速度駛離這條軌跡,,這是因?yàn)樵谠撥壍赖倪@一部分,,賽車有更多的抓地力。現(xiàn)在我們來(lái)縱觀一下整個(gè)轉(zhuǎn)向過(guò)程,,在由內(nèi)而外的轉(zhuǎn)向軌道中,,‘V’形部分(即在圖5中DiffGyro值為負(fù)的黑色橢圓曲線部分)是整個(gè)行駛過(guò)程中速度最快的部分,由此可以推斷出,,‘V’形部分的初期開始加速,,如圖5B點(diǎn)速度所示,之后則開始減速,。
結(jié)論
MTi-G微型姿態(tài)方位參考系統(tǒng)已經(jīng)在法國(guó)南部的Nogaro賽車場(chǎng)測(cè)試過(guò)生物賽車,,為確定最佳比賽線路,剎車/加速配置,,過(guò)度轉(zhuǎn)向和轉(zhuǎn)向不足的行為,,偏角,,半徑的軌跡和賽道上的速度剖面提供了大量的準(zhǔn)確數(shù)據(jù)。
無(wú)論是體積,,功耗還是成本,,相較于高端測(cè)量系統(tǒng),MTi- G是分析改進(jìn)賽車應(yīng)用數(shù)據(jù)的理想選擇,。


作捕捉系統(tǒng)Awinda版")
作捕捉系統(tǒng)Awinda版")
作捕捉系統(tǒng) Link版")
作捕捉系統(tǒng) Link版")
據(jù)手套")




