Force Dimension設(shè)備在微操縱領(lǐng)域中的應(yīng)用
文章來源:Force Dimension
作者:Frank
發(fā)布時間:2010年12月28日
點擊數(shù):
次
|
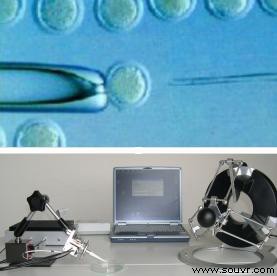
微操縱機器人是一種小型機器人,,專門用于對微型物體進行裝卸,這類物體通常比人的頭發(fā)還細,。機器人在精確度方面有很強優(yōu)勢,,但在完成復(fù)雜、動態(tài)的任務(wù)時,,必須要由操作人員控制。傳統(tǒng)使用界面為用戶提供的實用信息不多,,操作人員通常無法實時獲知微觀層面的情況,。 觸覺技術(shù)為操控微型物體提供了一種非常直觀的交互方式。觸覺設(shè)備可以把位置命令縮小,,通過末端受動器把縮小的位置命令發(fā)送至微操縱機器人,,從而把操作人員的普通動作轉(zhuǎn)換為高精度的抓取、放置命令,。此外,,觸覺設(shè)備還可以把微型機器人探測到的作用力放大,并傳回到操作人員手中,,從而提供了實時操作反饋,。借助這種設(shè)置,工作人員觸碰微型顆粒時,感覺如同觸摸高爾夫球,。 >>相關(guān)產(chǎn)品 |
 打印本文
打印本文 關(guān)閉窗口
關(guān)閉窗口