Haption通用遙控控制器,可輕松集成到工業(yè)機器人控制中
TeleRobotics EXtender (TREX) 是一個專為力反饋遠程操作而設(shè)計的框架。它為操作員必須在危險,、具有挑戰(zhàn)性或受限的環(huán)境中操作的情況提供了一種創(chuàng)新的解決方案,,使他們能夠在不暴露自己風險的情況下執(zhí)行任務(wù)。借助 TREX,,操作員可以手動控制遠程機器人,,具有很高的靈活性和精確度,同時還可以通過 Virtuose 力反饋設(shè)備感知作用力,。
TREX 為在機器人系統(tǒng)中集成遠程操作和力反饋設(shè)備提供了直接的解決方案,。
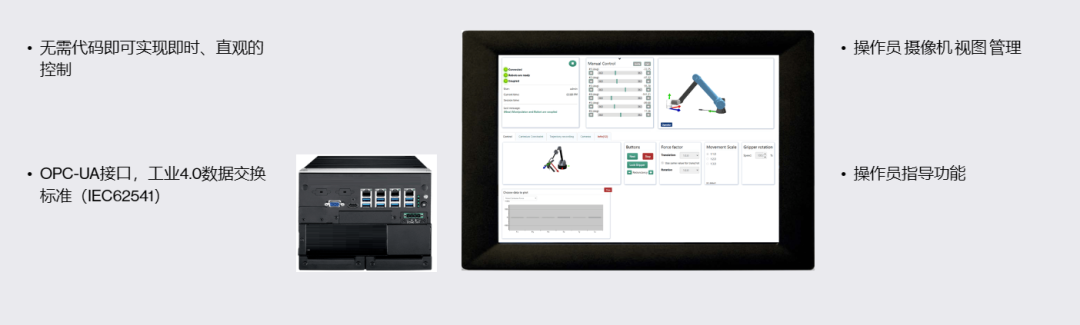
實用且直觀的人機界面
遠程操作狀態(tài)可視化
機器人實時三維可視化
力反饋設(shè)備的實時 3D 可視化
力反饋比率控制箱
運動比率控制箱
每個機器人軸位置可視化,具有手動控制功能
機器人作用力和扭矩的可視化
使用笛卡爾約束為操作員提供引導功能
使用靜態(tài)和動態(tài)攝像機時,,選擇操作員的視點

該解決方案被稱為遠程機器人解決方案,,由以下組件組成:?
HAPTION力反饋設(shè)備VIRTUOSE 6D HF TAO或VIRTUOSE 6D TAO、機械手,,可通過以太網(wǎng)或EtherCAT連接,。?
一種名為“TREX”的 HAPTION通用遠程操作控制器設(shè)備,在加固的硬件控制器上運行,。?
該解決方案可連接到第三方供應(yīng)商機器人,,包括市面上常見所有型號!
此外,,該系統(tǒng)還設(shè)計用于在末端執(zhí)行器上容納第三方機器人工具,,例如用于抓取和操作的夾持器或用于切割、研磨或擰松螺絲等任務(wù)的其他工具,。?

根據(jù)使用情況,,操作員可以使用靠近或遠離機器人的力反饋操縱器進行操作。
借助力反饋技術(shù),,操作員可以感受到機器人的動態(tài)和施加的力,。這種力感對于最大限度地降低對環(huán)境或機器人本身造成損害的風險至關(guān)重要。機器人忠實地復制了操縱器的動作,,使其感覺就像操作員手的延伸,。

通過使用機械手,操作員可以舒適地工作,,同時保留所有手動技能,,而無需暴露在危險或受限的環(huán)境中。機械手還允許用戶感知機器人的動態(tài),,包括抓取物體的重量和任何潛在的碰撞,。?
一組按鈕使操作員能夠調(diào)整機器人的力量和運動規(guī)模等參數(shù)。?
總而言之,,TREX為以下方面提供了理想的解決方案:
減少操作員暴露于環(huán)境風險中,,同時允許精確控制機器人的運動并提高靈活性,。
最大限度地利用操作員的手動技能和認知能力。
確保人類操作員仍然掌控所有決策,。?
通過TREX,,操作員可以繼續(xù)通過機器人實時發(fā)揮他們的專業(yè)知識和手動技能,而無需編程,。TREX使用戶能夠立即控制自己的遙控機器人系統(tǒng),,因為它被設(shè)計為“無代碼”解決方案。
TREX 的功能
HAPTION提供經(jīng)過驗證的解決方案,,并通過以客戶需求為導向的路線圖推動創(chuàng)新,。
 打印本文
打印本文 關(guān)閉窗口
關(guān)閉窗口