數(shù)據(jù)手套驅(qū)動的靈巧手遙操作如何實現(xiàn)?應用潛力如何,?
靈巧手作為機器人技術的重要組成部分,,其應用越來越廣泛。特別是在高風險或高精度作業(yè)環(huán)境中,,由數(shù)據(jù)手套驅(qū)動的靈巧手遙操作技術顯得尤為重要,。本文將深入探討由數(shù)據(jù)手套驅(qū)動的靈巧手遙操作解決方案具體是如何實現(xiàn)的,以及該方案在未來的應用前景,。
一,、技術原理
數(shù)據(jù)手套驅(qū)動的靈巧手遙操作技術主要依賴于數(shù)據(jù)手套與靈巧手之間的實時通信與反饋機制。數(shù)據(jù)手套通過內(nèi)置的高精度傳感器捕捉操作員的手部運動信息,,包括手指的彎曲,、手掌的旋轉(zhuǎn)等,然后將這些信息實時傳輸給靈巧手,。靈巧手根據(jù)接收到的指令進行相應的動作,,并通過內(nèi)置的觸覺傳感器將反饋信號回傳給數(shù)據(jù)手套,讓操作員感受到實際的操作效果,。
二,、硬件組成
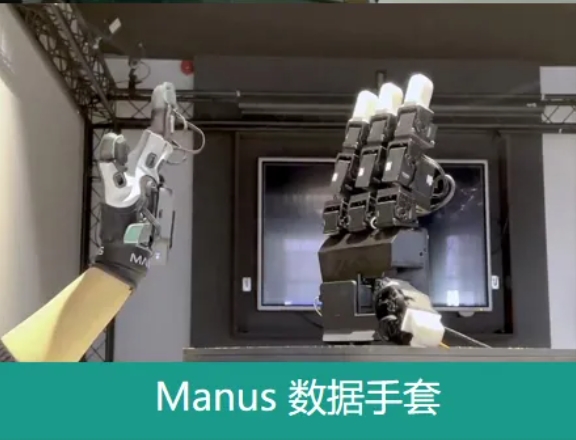
數(shù)據(jù)手套:作為操作端的核心設備,數(shù)據(jù)手套通常配備有高精度的彎曲傳感器,、加速度計,、陀螺儀等,,能夠精確捕捉手指的細微動作。如SenseGlove,、Manus,、5DT等品牌的觸覺反饋數(shù)據(jù)手套,不僅能捕捉動作,,還能提供力反饋和振動觸覺反饋,,使操作員獲得更真實的操作體驗。


靈巧手:靈巧手具有多個自由度(通常為6自由度),,并配備有觸覺傳感器,、壓力傳感器等,能夠執(zhí)行復雜的抓取和操作任務,。例如,,五指靈巧手通過指尖的多陣列壓力傳感器,可高精度地執(zhí)行多種抓取操作,,并實時反饋抓握力度,。
通信系統(tǒng):數(shù)據(jù)手套與靈巧手之間通過USB、藍牙,、Wi-Fi等多種通信方式實現(xiàn)數(shù)據(jù)的實時傳輸,。穩(wěn)定的通信系統(tǒng)是保障遙操作流暢性的關鍵。
三,、實現(xiàn)步驟
建立映射關系:首先,,需要建立數(shù)據(jù)手套與靈巧手之間的運動映射關系。通過算法將手套捕捉到的手部運動信息轉(zhuǎn)換為靈巧手可以理解的指令,。這一步是實現(xiàn)遙操作的基礎,。
實時傳輸數(shù)據(jù):利用穩(wěn)定的通信系統(tǒng)將手套捕捉到的手部運動信息實時傳輸給靈巧手。同時,,靈巧手也將執(zhí)行結果和觸覺反饋信息回傳給數(shù)據(jù)手套,。
執(zhí)行操作與反饋:靈巧手根據(jù)接收到的指令執(zhí)行相應的操作,并通過觸覺傳感器將操作過程中的反饋信息回傳給數(shù)據(jù)手套,。操作員通過手套的力反饋和振動觸覺反饋感知實際的操作效果,,從而進行更加精確的操作。
優(yōu)化與調(diào)試:在實際應用中,,還需要對系統(tǒng)進行不斷的優(yōu)化和調(diào)試,,以確保操作的穩(wěn)定性和準確性。通過調(diào)整算法參數(shù),、優(yōu)化通信協(xié)議等方式,,提升系統(tǒng)的整體性能。
四,、應用前景
以數(shù)據(jù)手套驅(qū)動的靈巧手遙操作技術在工業(yè),、醫(yī)療,、軍事等領域具有廣闊的應用前景。例如,,在醫(yī)療手術中,,醫(yī)生可以通過佩戴數(shù)據(jù)手套遠程操作機器人完成精細的手術操作;在軍事任務中,,操作員可以在安全環(huán)境中遠程操控機器人執(zhí)行危險任務,。這些應用不僅提高了工作效率和安全性,還極大地拓展了機器人的應用范圍,。
綜上所述,,以數(shù)據(jù)手套驅(qū)動的靈巧手遙操作技術通過高精度的傳感器、穩(wěn)定的通信系統(tǒng)和智能的算法實現(xiàn)了操作員與機器人之間的無縫連接,,為機器人技術的進一步發(fā)展提供了有力支持,。
 打印本文
打印本文 關閉窗口
關閉窗口