俄勒岡大學為OptiTrack開發(fā)ROS數據傳輸插件
OptiTrack是一家專門從事運動跟蹤與動作捕捉的公司,,其開發(fā)的相機和軟件可用來精確跟蹤空間中的標記,。當前,該系統(tǒng)支持聯通多個攝像機以每秒 120 幀以上的速度識別和跟蹤亞毫米級精度的標記,,并使用其軟件 Motive 實時顯示數據,。 OptiTrack的客戶涉及電影、視頻游戲制作,、生物力學和制造領域,。
由于OptiTrack能夠精準定位大空間內的物體位置,且很多客戶也在使用ROS(機器人操作系統(tǒng))控制由OptiTrack的Motive軟件來跟蹤的機器人系統(tǒng),。但目前Motive軟件沒有現成的插件可將數據實時導出到ROS中這就需要研發(fā)團隊耗費時間與精力來開發(fā)這一插件,,考慮到有一些用戶需要將Motive軟件的數據直接發(fā)送到運行 ROS 的機器人系統(tǒng)。俄勒岡大學工程學院開展了一項名為ROS2 Plugin插件開發(fā)的項目,。該項目旨在通過創(chuàng)建將Motive直接集成到ROS環(huán)境中的插件,,發(fā)揮OptiTrack硬件與軟件產品在制造和機器人領域中的更大潛力。該項目的成果不僅將滿足OptiTrack的市場需求,,還將讓其機器人客戶擁有更完全集成的3D空間,,為同一空間中多個機器人交互打開大門。

該項目是為ROS開發(fā)一個C++插件,,此插件將促進ROS與Motive之間的通信,,且能夠解釋從Motive傳輸的全局坐標并將其轉換為ROS數據。Motive將跟蹤安裝此插件的機器人,,然后向機器人發(fā)送其全局坐標以及體積中的任何其他對象,,我們的插件會將這些數據解釋為對ROS有意義的數據。最終用戶能夠安裝該插件,,并獲取ROS格式的Motive數據以集成到他們現有的系統(tǒng)中,。該通信管道經過測試可靠且一致,可應用于一些重要的工業(yè)應用之中,。
下面是該項目的應用具體流程:
OptiTrack 系統(tǒng)追蹤位置數據
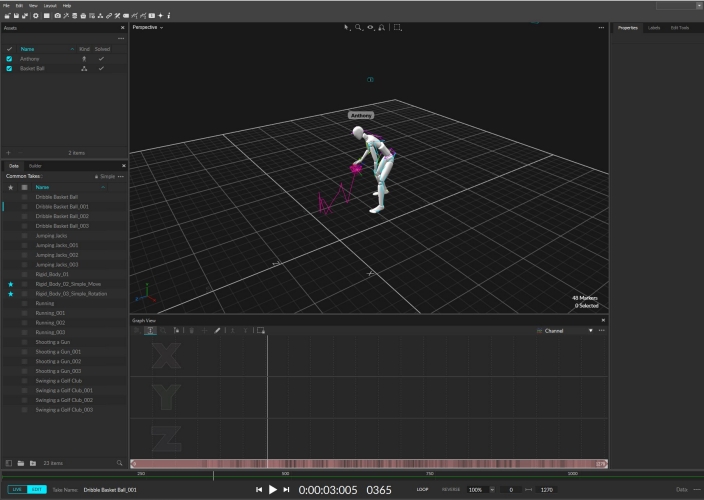
1.?使用OptiTrack相機和軟件解決方案,,我們能夠以亞毫米級別的精確度追蹤一定范圍內帶有標記點的物體或機器人,。
2.?動作捕捉軟件,Motive可以以幾百幀每秒的速度處理捕捉到的數據和進程,。
3.?系統(tǒng)能夠實時自動識別和標記位于標記設置空間內的不同物體,。
4.?所有的數據將會使用NatNet SDK通過ROS2 Plugin直接從Motive流式傳輸到ROS中。
NatNet SDK 檢測來自Motive的數據

1.?使用OptiTrack的NatNet SDK,,我們能將數據從Motive流式導出到插件中,。
2.?ROS2插件可將數據從NatNet轉譯成ROS可識別的格式并使之對ROS生態(tài)系統(tǒng)可用。
3.?該插件同樣扮演著ROS與Motive之間媒介的角色,,在兩個軟件間雙向傳輸信息與指令,。
機器人演示

1.?機器人會接收和解析由Motive收集的用戶定義頻率的全部數據。
2.?機器人會根據Motive傳輸的數據找到其底座和抓手的位置,。
3.?機器人將驗證特定物體的位置,,該位置由Motive中建立的唯一標識符進行識別。
4.?在確認物體位于指定的接近范圍內后,,機器人會執(zhí)行動作以使其抓手與物體接觸,。
翻譯
搜索
復制
?
 打印本文
打印本文 關閉窗口
關閉窗口