ART Motion Capture動(dòng)作捕捉應(yīng)用
ART Motion Capture動(dòng)作捕捉應(yīng)用
?
動(dòng)作捕捉的含義
?

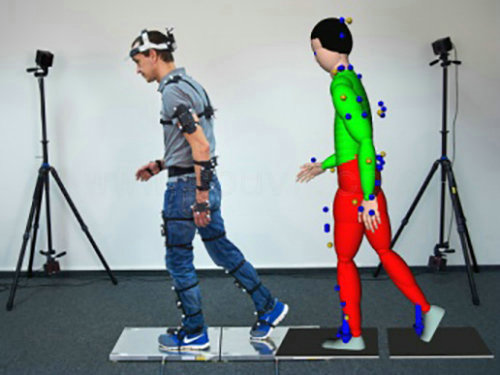
動(dòng)作捕捉的含義是把人類、動(dòng)物,、物體的運(yùn)動(dòng)數(shù)字化,。ART動(dòng)作捕捉系統(tǒng)在捕捉對(duì)象的身體上安裝標(biāo)記,,捕捉對(duì)象無(wú)須穿戴萊卡服,然后在事先安裝好的相機(jī)組前進(jìn)行動(dòng)捕,。ART動(dòng)捕套裝有兩個(gè)版本:光學(xué)動(dòng)捕和混合動(dòng)捕,。在動(dòng)捕工作開(kāi)始前,對(duì)身體上的標(biāo)記進(jìn)行精確標(biāo)定是非常重要的,,標(biāo)定后才能對(duì)運(yùn)動(dòng)進(jìn)行精準(zhǔn)的捕捉,。ART動(dòng)捕標(biāo)定簡(jiǎn)單、快速,、方便,,只需一步即可完成。捕捉對(duì)象進(jìn)行一系列隨機(jī)運(yùn)動(dòng),,自動(dòng)計(jì)算骨骼長(zhǎng)度和標(biāo)記位置,。計(jì)算結(jié)果自動(dòng)傳輸給虛擬人物,可實(shí)時(shí)使用,,無(wú)須后處理,。ART動(dòng)捕系統(tǒng)專為沉浸式虛擬現(xiàn)實(shí)和人機(jī)工程設(shè)計(jì),是與德國(guó)大眾公司AVILUS項(xiàng)目合作后生產(chǎn)的,,最多可同時(shí)動(dòng)捕三人(限第三人的上半身),。
?
?
用ART-Human軟件做動(dòng)捕
?
ART-Human軟件使用六自由度光學(xué)標(biāo)記跟蹤人體運(yùn)動(dòng),輔助動(dòng)捕項(xiàng)目,。17個(gè)標(biāo)記符合人機(jī)工程并可直接安裝普通服裝上,。ART-Human軟件的生物力學(xué)模型能自動(dòng)標(biāo)定肢體長(zhǎng)度。安裝好標(biāo)記后即可快速便捷地標(biāo)定,。用戶只須活動(dòng)各個(gè)關(guān)節(jié)20秒左右,,軟件便開(kāi)始標(biāo)定精度,肢體長(zhǎng)度和六自由度標(biāo)記零偏數(shù)據(jù)應(yīng)用到模型上,。ART-Human軟件可實(shí)時(shí)把人體生物力學(xué)模型數(shù)據(jù)實(shí)時(shí)發(fā)送到您的軟件上,。數(shù)據(jù)的格式是6dj,與Fingertracking手部數(shù)據(jù)格式類似,。您也可以同時(shí)使用Fingertracking和ART-Human軟件。人體運(yùn)動(dòng)實(shí)時(shí)連接三維軟件中的虛擬人物,。
?

?
產(chǎn)品特點(diǎn)
?
?人體骨骼模型完整運(yùn)動(dòng)學(xué)數(shù)據(jù)
?標(biāo)定步驟簡(jiǎn)單
?六自由度光學(xué)跟蹤標(biāo)記
?快速自動(dòng)標(biāo)定骨骼長(zhǎng)度(小于一分鐘)
?實(shí)時(shí)連接各種三維軟件
?輸出格式:VRPN, 6dj
?保存文件格式:C3D, BVH,,RAMSIS CSV
?完全兼容ART Fingertracking系統(tǒng)。
?
虛擬現(xiàn)實(shí)中應(yīng)用動(dòng)捕
位置跟蹤頭顯給用戶提供了極好的沉浸式體驗(yàn),。如果用戶身穿動(dòng)捕系統(tǒng),,他們能在三維環(huán)境中與其他用戶真實(shí)互動(dòng),特別適合進(jìn)行成本昂貴的多人訓(xùn)練或者在真實(shí)世界非常危險(xiǎn)的訓(xùn)練任務(wù),。
裝配仿真
裝配計(jì)劃的重點(diǎn)是驗(yàn)證零件能否安裝在設(shè)計(jì)區(qū)域,,操作工是否有足夠的空間安全安裝零件,。使用動(dòng)捕進(jìn)行這項(xiàng)工作比使用物理樣機(jī)經(jīng)濟(jì)的多。
整車空間驗(yàn)證模型
設(shè)計(jì)汽車內(nèi)飾使用虛擬空間模型替代物理樣機(jī),,用頭顯觀看內(nèi)飾的三維細(xì)節(jié),。通常須要在上半身安裝標(biāo)記對(duì)胳膊和手臂進(jìn)行動(dòng)捕??蛻羰褂肁RT Fingertracking結(jié)合動(dòng)捕獲得精確的手指運(yùn)動(dòng),。
?

培訓(xùn)
對(duì)員工進(jìn)行器材培訓(xùn)具有潛在風(fēng)險(xiǎn),成本昂貴也是長(zhǎng)期的困擾,。例如:公司重點(diǎn)區(qū)域防火培訓(xùn),,重型機(jī)械維護(hù)培訓(xùn)。使用虛擬現(xiàn)實(shí)技術(shù)可以讓員工在電腦生成的真實(shí)環(huán)境中安全地接受培訓(xùn),,更好地學(xué)習(xí)理解復(fù)雜重復(fù)性的工作,。
人機(jī)工程學(xué)應(yīng)用動(dòng)捕
生產(chǎn)計(jì)劃的重點(diǎn)是盡快把產(chǎn)品組裝好,讓工人長(zhǎng)期安全作業(yè),。因此需要在實(shí)際作業(yè)前進(jìn)行人機(jī)工程研究,。不用鍵盤(pán)和鼠標(biāo)控制虛擬人物,而是使用動(dòng)捕照常作業(yè),。動(dòng)捕將動(dòng)作數(shù)字化并把數(shù)據(jù)傳輸給虛擬人物進(jìn)行詳細(xì)分析,,比較不同的任務(wù)。光學(xué)動(dòng)捕系統(tǒng)的缺點(diǎn)是:使用時(shí),,相機(jī)和動(dòng)捕標(biāo)記之間可能被阻擋,。為了解決這個(gè)問(wèn)題,ART公司開(kāi)發(fā)了一款混合動(dòng)捕系統(tǒng),,這款產(chǎn)品使用了傳統(tǒng)光學(xué)標(biāo)記和性能穩(wěn)定的慣性傳感器,,即使捕捉對(duì)象不在相機(jī)范圍內(nèi)也可以精確跟蹤數(shù)據(jù),數(shù)據(jù)不會(huì)被中斷,。ART公司動(dòng)捕系統(tǒng)兼容Alaska/Dynamicus人機(jī)工程軟件,,按照人機(jī)工程評(píng)估作業(yè)表標(biāo)準(zhǔn)計(jì)算操作工的人機(jī)工程數(shù)據(jù)。
 打印本文
打印本文 關(guān)閉窗口
關(guān)閉窗口